Conquer:
Continual Quadruped Robots Coordination via Semantic Skill Discovery
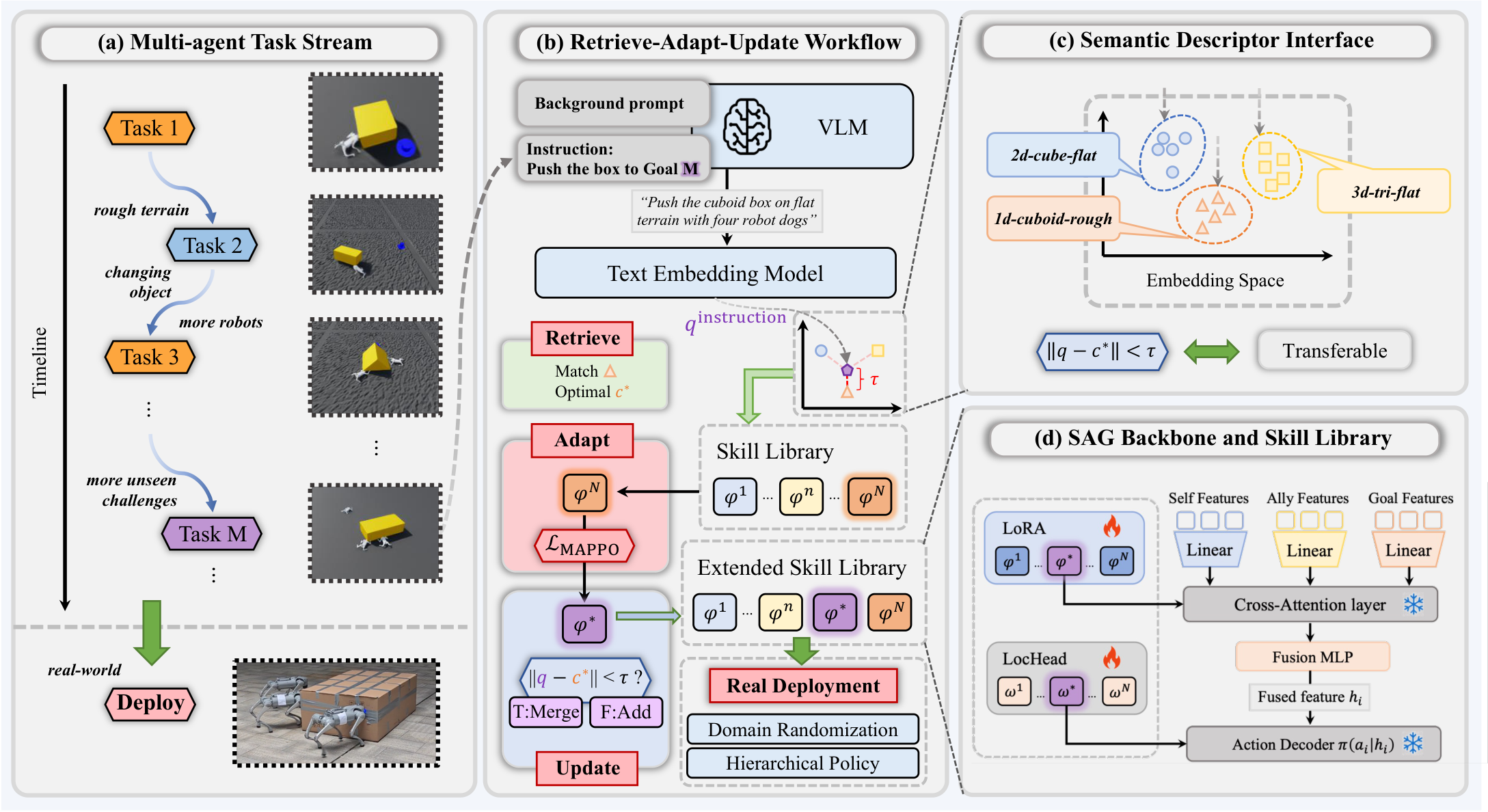
Method Overview
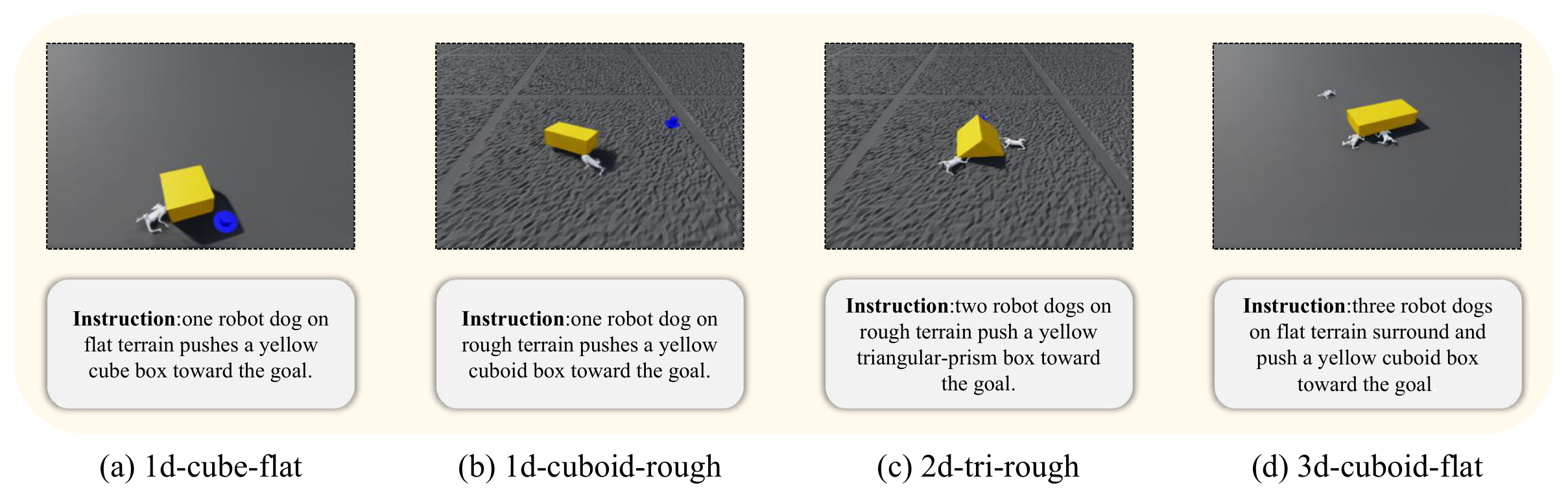
Simulation Tasks
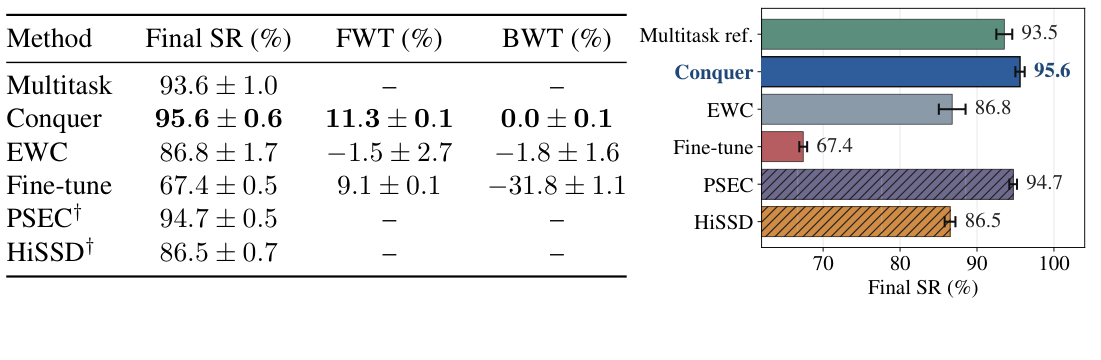
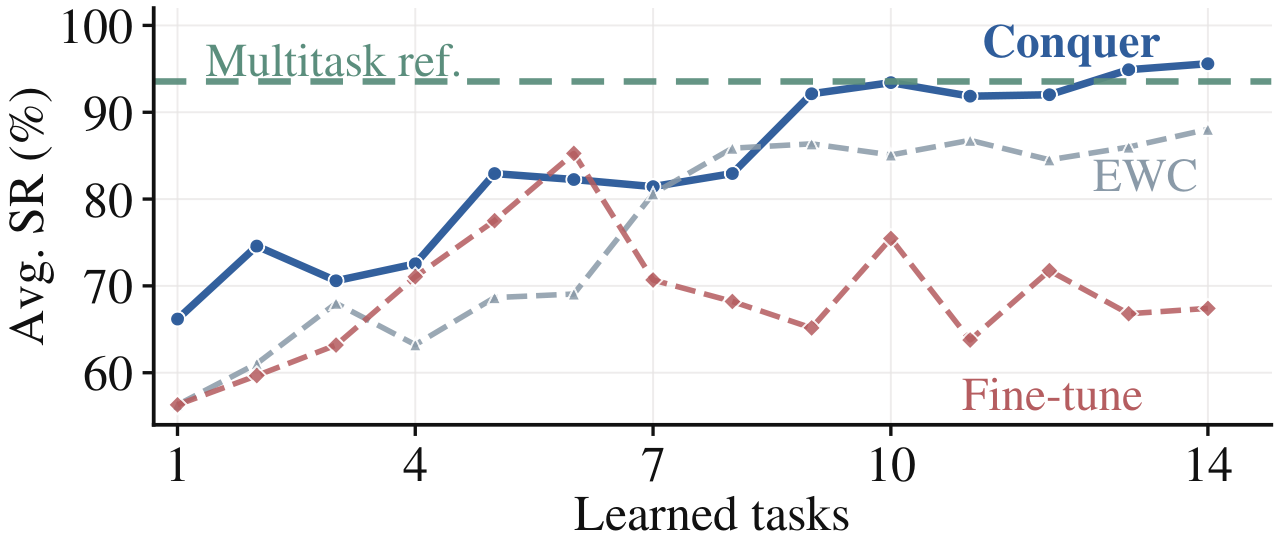
Main Results
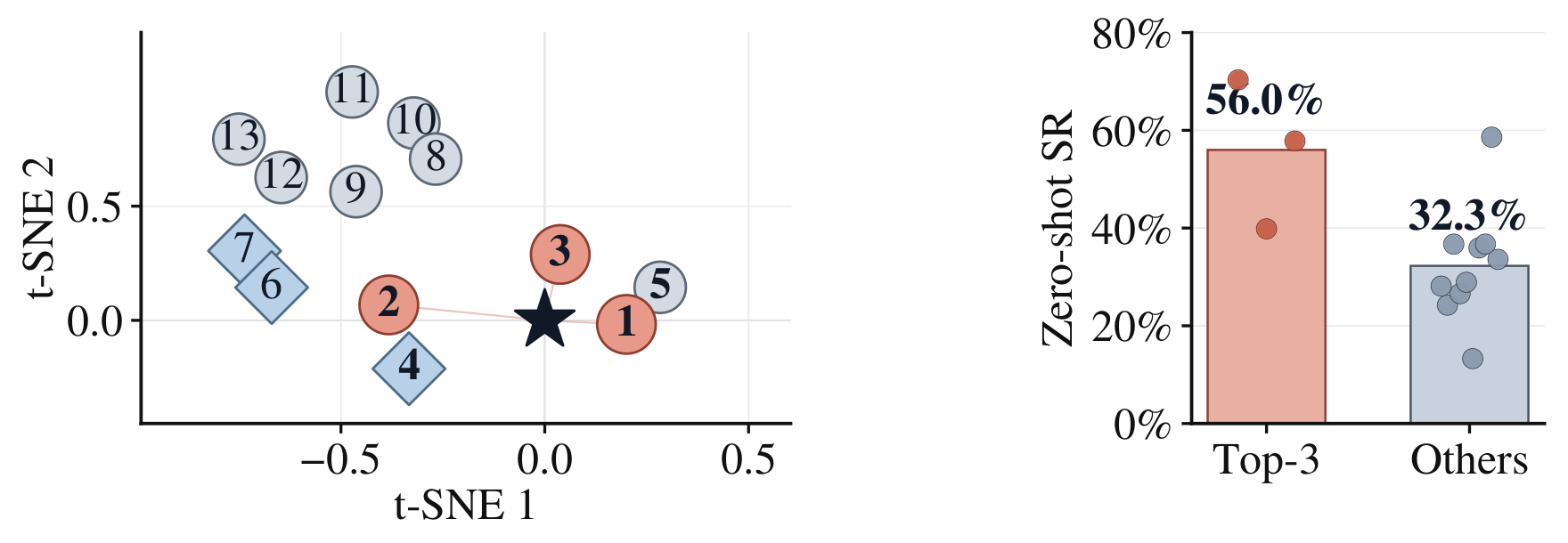
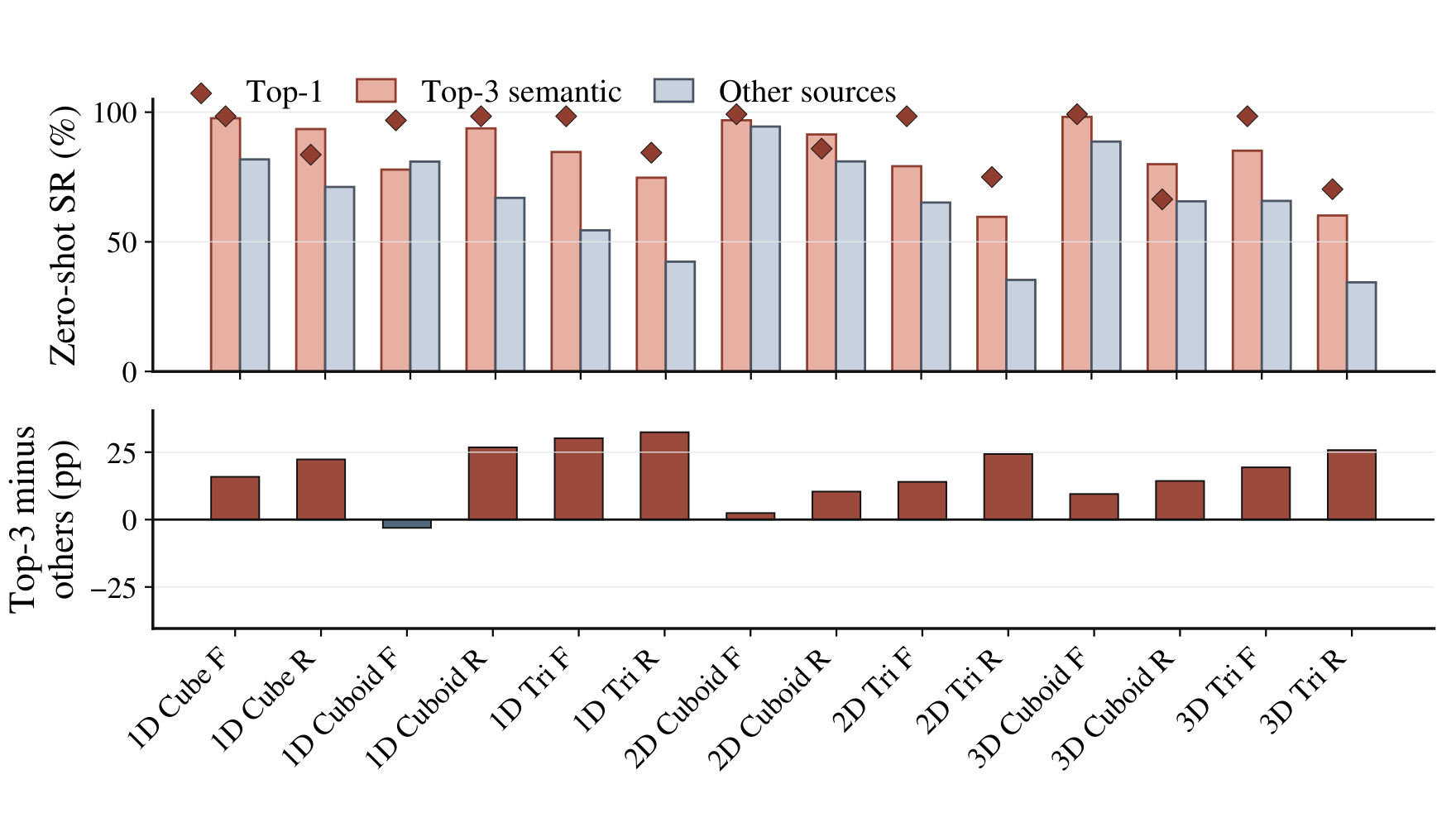
Case Study
Real-Robot Deployment
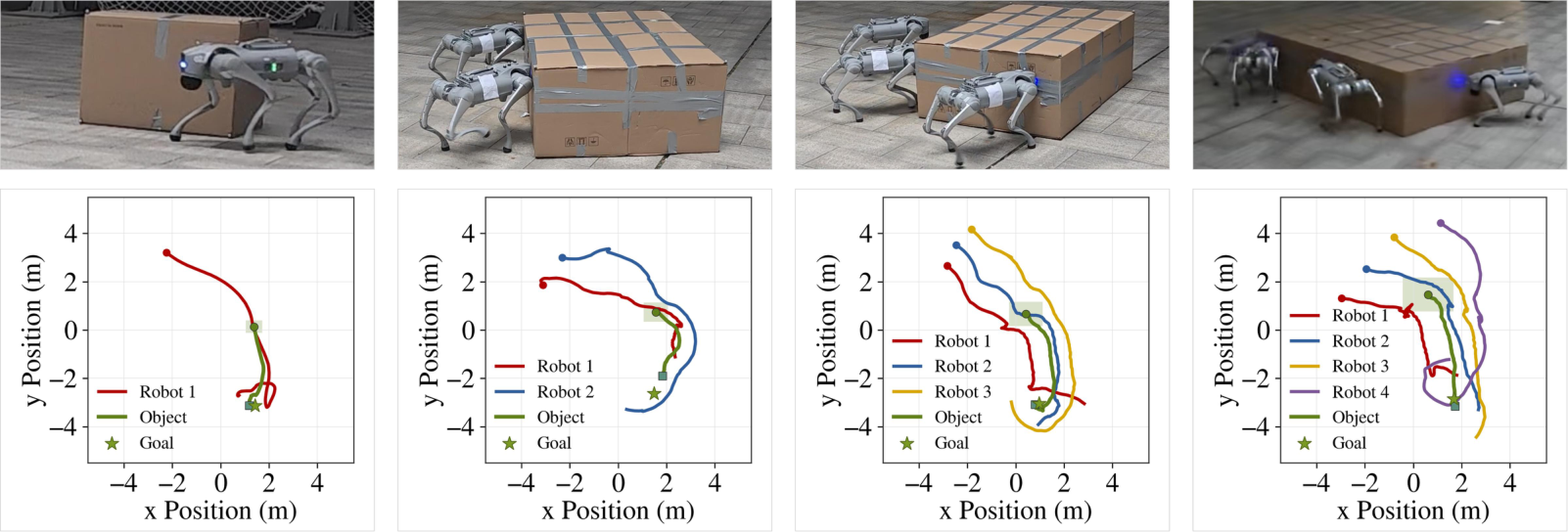
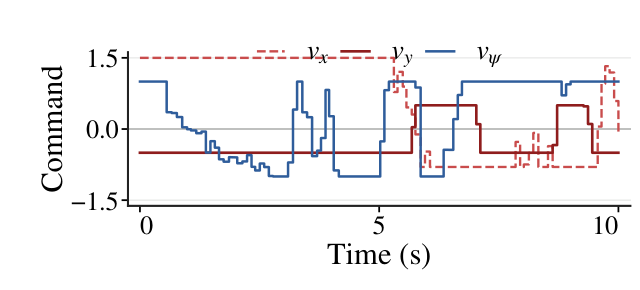
1-Dog Tracking
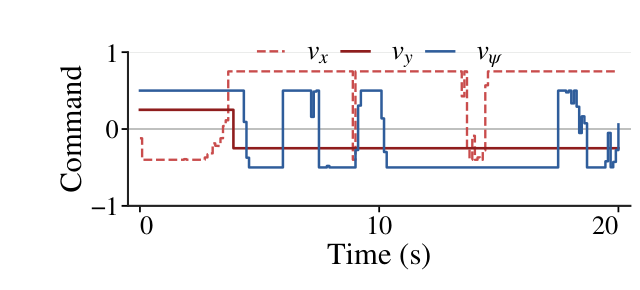
2-Dog Coordination
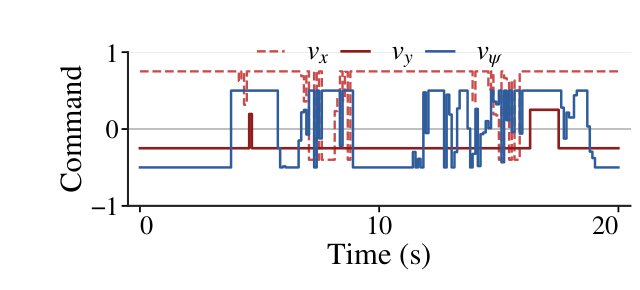
3-Dog Coordination
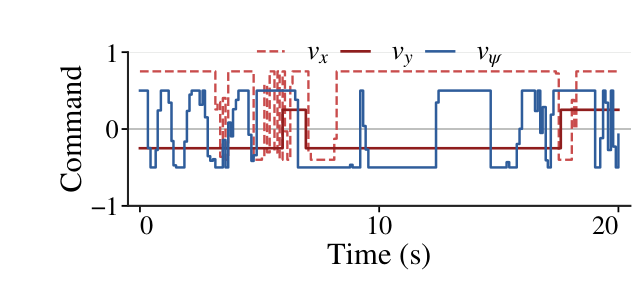
4-Dog Coordination
Command tracking waveforms for 1–4 dog deployments. Each subplot shows the commanded (dashed) versus actual (solid) velocity profiles, demonstrating accurate real-world command following across all team sizes.
Real-robot Demonstrations
Single-dog Fixed-point
Two-dog Fixed-point
Three-dog Tracking
Three-dog Fixed-point
Four-dog Fixed-point
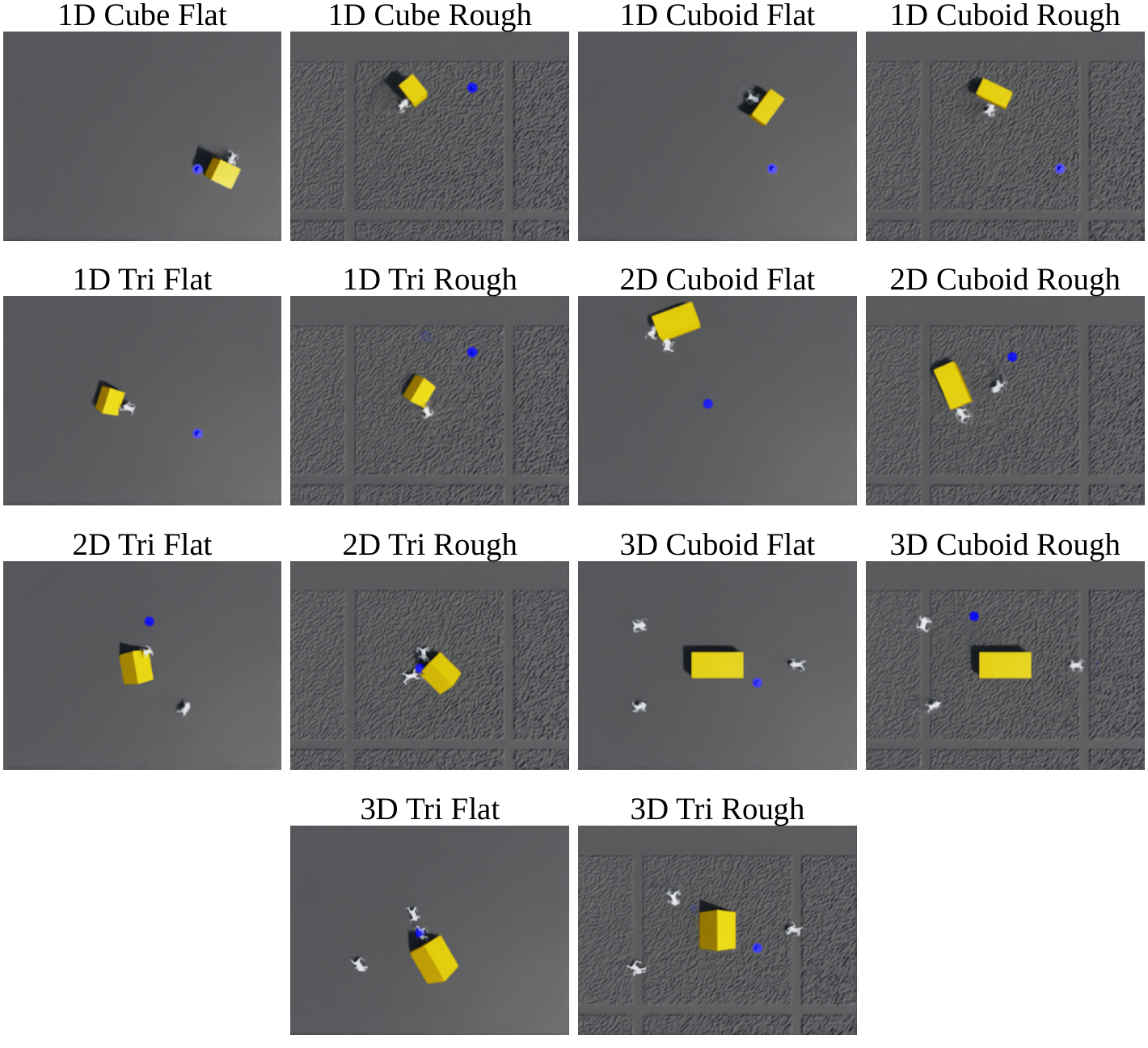
Simulation Demonstrations
1D Cube (Flat)
1D Cube (Rough)
1D Cuboid (Flat)
1D Cuboid (Rough)
1D Triangle (Flat)
1D Triangle (Rough)
2D Cuboid (Flat)
2D Cuboid (Rough)
2D Triangle (Flat)
2D Triangle (Rough)
3D Cuboid (Flat)
3D Cuboid (Rough)
3D Triangle (Flat)
3D Triangle (Rough)
Abstract
Multi-quadruped coordination has attracted increasing attention due to its enhanced payload capacity, broader contact coverage, and improved adaptability to challenging tasks. Existing methods for multi-quadruped manipulation typically focus on predefined or closed task families, often relying on multi-agent reinforcement learning (MARL) to train task-specific coordination policies. However, such methods struggle in open-ended continual learning settings, where tasks arrive sequentially and robots are expected to acquire new coordination skills while reusing previously learned ones without catastrophic forgetting.
To address this challenge, we propose Conquer, a semantic skill-library framework that formulates continual multi-quadruped coordination as a retrieve-adapt-update process. First, to accommodate varying team sizes across tasks, we design a team-structured Self-Allies-Goal (SAG) backbone that supports variable-cardinality robot teams by explicitly modeling each robot's own state, teammate context, and task goal. For each incoming task, Conquer constructs a task-level semantic descriptor from pre-execution information and retrieves a relevant skill from the library for adaptation. After successful execution, Conquer updates the skill library by extracting trajectory-level semantic descriptors and organizing them according to semantic distance, thereby enabling continual skill accumulation and cross-task knowledge transfer.
Simulation experiments show that Conquer achieves a final average success rate of 95.6%, demonstrating strong forward transfer and negligible catastrophic forgetting. Real-world rollouts on Unitree Go2 teams further validate the deployment feasibility of Conquer for practical multi-quadruped coordination.
Team
BibTeX
@misc{conquer2026,
title = {Conquer: Continual Quadruped Robots Coordination via Semantic Skill Discovery},
author = {Anonymous},
year = {2026},
}